本文源码:https://github.com/Philon/rpi-drivers/tree/master/02-gpio_key
在上一篇中主要学习了GPIO原理及Linux字符设备,其过程大致是这样子的:
1
| 电路图“看引脚” --> 手册“看物理地址” --> 寄存器手册“看GPIO逻辑控制” --> 复用功能 --> 地址操作
|
可以看到,整个过程是非常繁琐的,驱动程序必须精确到处理器的每一根引脚的状态,如果所有驱动都这么写估计当场就跪了。因此,本文除了学习GPIO中断原理之外,更重要是掌握以下知识:
- 混杂设备机制
- Linux内核GPIO接口
- ARM中断基础
- Linux内核中断接口
ARM中断基础
中断,就是由外部电路产生的一个电信号,强制CPU从当前执行代码区转移到中断处理函数。ARM架构的CPU中断硬件原理和这个差不多,注意这里说的是ARM的CPU,仅仅代表处理器当中的一个核,不要把CPU和SoC划等号。
CPU能提供的中断资源是非常有限的,一般也就一两个“引脚”,但我们在看芯片手册的时候就会发现,几乎每个GPIO都具备中断功能,那可是几十上百个中断啊!这归功于内部继承的PIC——可编程中断控制器,它负责监听所有GPIO的中断信号,并在外设给出中断信号时真正去触发CPU中断,并告诉CPU是谁触发的。这种中断信号源被抽象为——中断号。
在现代多核处理器架构下,ARM用的是GIC(通用中断控制器),它能支持SGI(软件生成中断)、PPI(单核私有外设中断)、SPI(多核共享外设中断)。默认情况下,ARM处理器的外设中断总是先给到CPU0,如果其忙不过来才往后传递。
那么CPU收到中断信号后又如何处理呢?ARM共有7种工作模式,常规情况下会运行于用户模式(用户代码区),一旦中断触发,会立刻切换至中断模式(响应函数),中断模式分为IRQ(中断)和FIQ(快速中断),它们二者的区别是,FIQ可以进一步中断IRQ。
由于是实战操作,过于理论的东西就不往上放了,如果要进一步了解ARM中断,可以参考这篇文章👉:https://my.oschina.net/u/914989/blog/121585
这里只需要掌握两个重要概念:
- 中断号本身可以看作一种独立的CPU资源,通过中断控制器监听真实的物理资源(引脚)状态
- CPU的外设中断会直接触发PC跳转到指定代码区
Linux/IRQ基础
正如前文所说,中断是让CPU切换执行上下文,尽管Linux操作系统通过时间切片的方式实现多任务,但IRQ切换是硬件层级的,进入中断函数就意味着什么进程、调度、并发等软件概念将全部失效。举例来说,一个进程调用sleep只会让自身运行停止并让出CPU资源,但在内核中断函数当中sleep,那就真睡过去了——整个操作系统的调度机制都会崩溃掉。
所以,Linux将中断处理分为“顶半部”和“底半部”,可以简单粗暴地理解:
- 顶半部,硬件级响应,处理内容必须快准狠,尽快将CPU资源交还操作系统
- 底半部,交由系统任务队列调度,处理耗时的响应业务
打个比方,顶半部好比医院挂号,底半部好比排队就诊的过程。但不要死脑筋,如果响应业务本身并不耗时,就没必要再拆分为两个处理部分了,比如出院缴费,直接在顶半部搞定。
带着这个原则,看一下Linux中断编程接口:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| #include <linux/interrupt.h>
int gpio_to_irq(unsigned gpio);
int request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags, const char *name, void *dev);
void *free_irq(unsigned int irq, void *dev);
|
下面来实际操作一把——Linux中断的顶半部处理实现。
最简单的GPIO中断
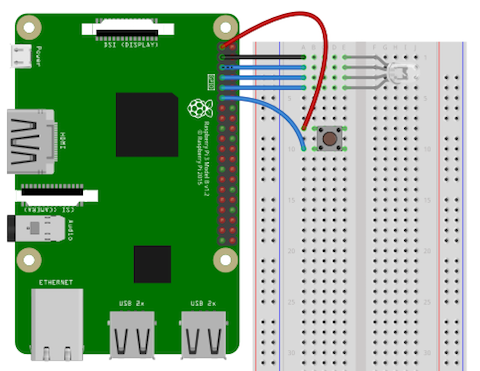
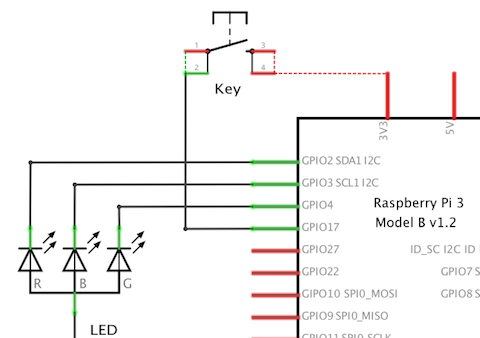
先来看个接线图,为了更好地展示中断,“继承”了上一篇文章的三色LED接线,预期要实现是“每按一次键改变一种颜色”。按键Key的两个脚接到了树莓派的GPIO17和3V3上,换句话说,就是用GPIO17接收上升沿中断信号。而LED的控制电路保持之前的不变。
实现GPIO上升沿中断大体分为4步:
- 设置GPIO复用功能为输入模式
gpio_request()
- 获取GPIO对应中断号
gpio_to_irq()
- 申请中断号、中断类型、绑定处理函数
request_irq()
- 释放中断(卸载驱动时)
free_irq()
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
| #include <linux/module.h>
#include <linux/gpio.h>
#include <linux/interrupt.h>
MODULE_LICENSE("Dual BSD/GPL");
MODULE_AUTHOR("Philon | https://ixx.life");
static unsigned int key_irq = 0;
static const struct gpio key = {
.gpio = 17,
.flags = GPIOF_IN,
.label = "Key0"
};
static irqreturn_t on_key_press(int irq, void* dev)
{
printk(KERN_INFO "key pressed\n");
return IRQ_HANDLED;
}
static int __init gpiokey_init(void)
{
int rc = 0;
if ((rc = gpio_request_one(key.gpio, key.flags, key.label)) < 0) {
printk(KERN_ERR "ERROR%d: cannot request gpio\n", rc);
return rc;
}
key_irq = gpio_to_irq(key.gpio);
if (key_irq < 0) {
printk(KERN_ERR "ERROR%d:cannot get irq num\n", key_irq);
return key_irq;
}
if (request_irq(key_irq, on_key_press, IRQF_TRIGGER_RISING, "onKeyPress", NULL) < 0) {
printk(KERN_ERR "cannot request irq\n");
return -EFAULT;
}
return 0;
}
module_init(gpiokey_init);
static void __exit gpiokey_exit(void)
{
free_irq(key_irq, NULL);
gpio_free(key.gpio);
}
module_exit(gpiokey_exit);
|
上述代码非常简单,就是在按下按键的时候,打印一条消息。可以通过dmesg命令查看内核打印消息:
1
2
3
4
5
6
7
8
| philon@rpi:~/modules $ sudo insmod gpiokey.ko
philon@rpi:~/modules $ dmesg
...
[ 77.238326] gpiokey: no symbol version for module_layout
[ 77.238345] gpiokey: loading out-of-tree module taints kernel.
[ 79.310635] key pressed
[ 79.463206] key pressed
[ 79.463262] key pressed
|
正如文章最开始所说,Linux对各种资源的调用是有相关API的,要尽量使用内核接口编写驱动程序,一能保证底层代码的质量,二能提高代码的移植性。关于GPIO资源的调用,要熟悉以下接口:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| #include <linux/gpio.h>
struct gpio {
unsigned gpio;
unsigned long flags;
const char *label;
};
int gpio_request_one(unsigned gpio, unsigned long flags, const char *label);
void gpio_free(unsigned gpio);
int gpio_request_array(const struct gpio *array, size_t num);
void gpio_free_array(const struct gpio *array, size_t num);
int gpio_get_value(unsigned gpio);
void gpio_set_value(unsigned gpio, int value);
|
按键防抖,中断的底半部与定时器接口
由于前边的代码没有做防抖,明明只按了一下按键,中断函数却被连续触发了3次。话说在单片机里实现按键防抖是非常简单的,无非就是睡个50毫秒,再确认是否真的按下即可。但是前文也明确说了,Linux是多任务系统,永远不要试图在中断函数里睡眠。因此,防抖只能放在Linux中断的底半部。
此外,慎用睡眠函数!除非你很清楚它不是忙等待。在多任务系统下,按键防抖的逻辑应该是——触发中断后,让出CPU资源50毫秒,然后再确认是否真的按下。
先来认识一下底半部机制,Linux内核提供的底半部机制主要有软中断、tasklet、工作队列、线程IRQ。
- 软中断,是有内核软件模拟的一种中断机制,注意不要和ARM指令触发的中断混淆,后者本质上是硬中断
- tasklet,基于软中断实现的中断调度机制,本质上还是中断,不允许在处理函数中sleep
- 工作队列,类似于tasklet,区别在于工作队列底层基于线程,可以在处理函数中sleep
- 线程IRQ,不用解释了,就是个线程
有关Linux底半部的知识不适合放在这里,建议参考此文:http://chinaunix.net/uid-20768928-id-5077401.html
这里了解底半部机制的目的,仅仅是为了挑选一种何时的响应方式,首先可以明确,软中断和tasklet不能睡,pass。线程维护麻烦,pass。就只剩工作队列了。尽管工作队列可以睡,但内核提供的usleep/msleep等接口本质上是忙等待,依旧占用CPU资源,pass。怎么办呢——工作队列+定时器。当中断来临后:
- 顶半部迅速定义个工作队列,交由内核调度
- 当工作队列被调度时,迅速定义个定时器——延时50ms
- 当定时器到时中断,才真的去做防抖判断
工作队列API:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| #include <linux/workqueue.h>
struct work_struct {
atomic_long_t data;
struct list_head entry;
work_func_t func;
#ifdef CONFIG_LOCKDEP
struct lockdep_map lockdep_map;
#endif
};
typedef void (*work_func_t)(struct work_struct *work);
INIT_WORK(work, func);
schedule_work(&my_wq);
|
定时器API:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
| #include <linux/timer.h>
extern unsigned long volatile jiffies;
#define HZ 100
struct timer_list {
struct hlist_node entry;
unsigned long expires;
void (*function)(struct timer_list *);
u32 flags;
#ifdef CONFIG_LOCKDEP
struct lockdep_map lockdep_map;
#endif
};
#define timer_setup(timer, callback, flags)
void add_timer(struct timer_list *timer);
int del_timer(struct timer_list *timer);
int mod_timer(struct timer_list *timer, unsigned long expires)
|
下面是本文的完整代码,按一次按键,切换一次彩色led的颜色:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
| #include <linux/module.h>
#include <linux/fs.h>
#include <linux/miscdevice.h>
#include <linux/gpio.h>
#include <linux/interrupt.h>
#include <linux/workqueue.h>
#include <linux/timer.h>
MODULE_LICENSE("Dual BSD/GPL");
MODULE_AUTHOR("Philon | https://ixx.life");
static const struct gpio key = {
.gpio = 17,
.flags = GPIOF_IN,
.label = "Key0"
};
static const struct gpio leds[] = {
{ 2, GPIOF_OUT_INIT_HIGH, "LED_RED" },
{ 3, GPIOF_OUT_INIT_HIGH, "LED_GREEN" },
{ 4, GPIOF_OUT_INIT_HIGH, "LED_BLUE" },
};
static unsigned int keyirq = 0;
static struct work_struct keywork;
static struct timer_list timer;
static irqreturn_t on_key_press(int irq, void* dev)
{
schedule_work(&keywork);
return IRQ_HANDLED;
}
void start_timer(struct work_struct *work)
{
mod_timer(&timer, jiffies + (HZ/20));
}
void on_delay_50ms(struct timer_list *timer)
{
static int i = 0;
if (gpio_get_value(key.gpio)) {
gpio_set_value(leds[i].gpio, 0);
i = ++i == 3 ? 0 : i;
gpio_set_value(leds[i].gpio, 1);
}
}
static int __init gpiokey_init(void)
{
int rc = 0;
if ((rc = gpio_request_one(key.gpio, key.flags, key.label)) < 0
|| (rc = gpio_request_array(leds, 3)) < 0) {
printk(KERN_ERR "ERROR%d: cannot request gpio\n", rc);
return rc;
}
keyirq = gpio_to_irq(key.gpio);
if (keyirq < 0) {
printk(KERN_ERR "can not get irq num.\n");
return -EFAULT;
}
if (request_irq(keyirq, on_key_press, IRQF_TRIGGER_RISING, "onKeyPress", NULL) < 0) {
printk(KERN_ERR "can not request irq\n");
return -EFAULT;
}
INIT_WORK(&keywork, start_timer);
timer_setup(&timer, on_delay_50ms, 0);
add_timer(&timer);
return 0;
}
module_init(gpiokey_init);
static void __exit gpiokey_exit(void)
{
free_irq(keyirq, NULL);
gpio_free_array(leds, 3);
gpio_free(key.gpio);
del_timer(&timer);
}
module_exit(gpiokey_exit);
|
小结
- ARM有7种工作模式,其中IRQ和FIQ为中断模式,会导致CPU跳转到指定代码区
- Linux/IRQ分为顶半部和底半部机制
- 顶半部处理要快且不是睡眠
- 底半部又分为4种机制,软中断、tasklet、工作队列、线程IRQ
- 我们可以通过gpio_xxx函数访问CPU资源,而无需地操作底层寄存器
- 如果有延时需求,最好采用内核提供的定时器接口