1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
| #include <linux/module.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <linux/miscdevice.h>
#include <linux/gpio.h>
#include <linux/interrupt.h>
#include <linux/timer.h>
#include <linux/wait.h>
MODULE_LICENSE("Dual BSD/GPL");
MODULE_AUTHOR("Philon | https://ixx.life");
static struct {
int gpio;
int irq;
wait_queue_head_t rwait;
struct timer_list timer;
u32 pulse;
u32 space;
size_t count;
u32 data;
} ir;
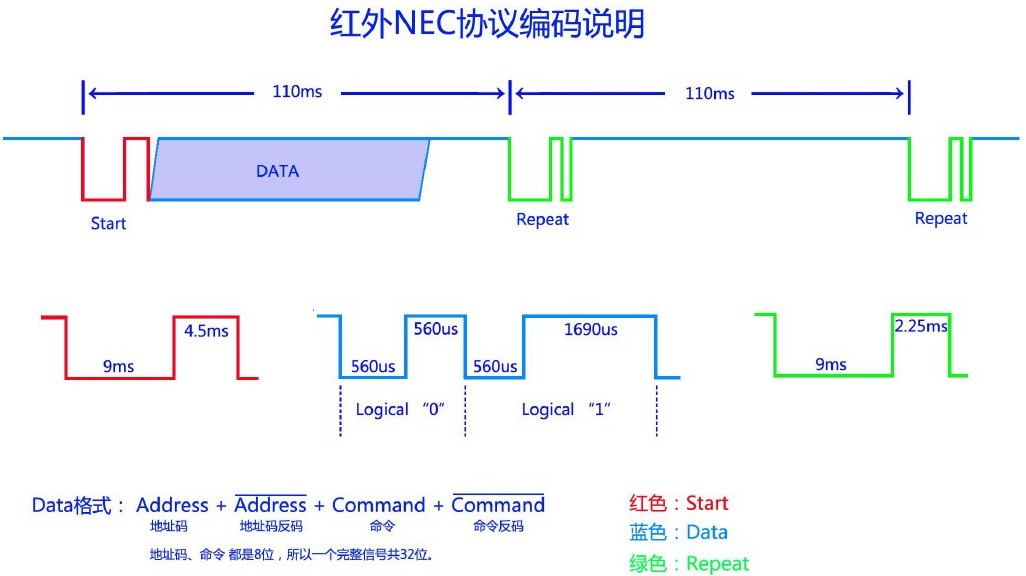
#define is_head(p, s) (p > 8900 && p < 9100 && s > 4400 && s < 4600)
#define is_repeat(p, s) (p > 8900 && p < 9100 && s > 2150 && s < 2350)
#define is_bfalse(p, s) (p > 500 && p < 650 && s > 500 && s < 650)
#define is_btrue(p, s) (p > 500 && p < 650 && s > 1500 && s < 1750)
static irqreturn_t ir_rx(int irq, void* dev) {
static ktime_t last = 0;
u32 duration = (u32)ktime_to_us(ktime_get() - last);
if (!gpio_get_value(ir.gpio)) {
ir.space = duration;
} else {
ir.pulse = duration;
goto irq_out;
}
if (is_head(ir.pulse, ir.space)) {
ir.count = ir.data = 0;
} else if (is_repeat(ir.pulse, ir.space)) {
ir.count = 32;
} else if (is_btrue(ir.pulse, ir.space)) {
ir.data |= 1 << ir.count++;
} else if (is_bfalse(ir.pulse, ir.space)) {
ir.data |= 0 << ir.count++;
} else {
goto irq_out;
}
if (ir.count >= 32) {
wake_up(&ir.rwait);
}
irq_out:
mod_timer(&ir.timer, jiffies + (HZ / 10));
last = ktime_get();
return IRQ_HANDLED;
}
static void clear_flag(struct timer_list *timer) {
ir.pulse = 0;
ir.space = 0;
ir.count = 0;
ir.data = 0;
}
static ssize_t ir_read(struct file *filp, char __user *buf, size_t len, loff_t *off) {
int rc = 0;
if ((filp->f_flags & O_NONBLOCK) && ir.count < 32) {
return -EAGAIN;
} else {
DECLARE_WAITQUEUE(wq, current);
add_wait_queue(&ir.rwait, &wq);
wait_event(ir.rwait, ir.count == 32);
remove_wait_queue(&ir.rwait, &wq);
}
rc = copy_to_user(buf, &ir.data, sizeof(u32));
if (rc < 0) {
return rc;
}
ir.count = 0;
*off += sizeof(u32);
return sizeof(u32);
}
static const struct file_operations fops = {
.owner = THIS_MODULE,
.read = ir_read,
};
static struct miscdevice irdev = {
.minor = MISC_DYNAMIC_MINOR,
.name = "IR1838-NEC",
.fops = &fops,
.nodename = "ir0",
.mode = 0744,
};
static int __init ir_init(void) {
int rc = 0;
init_waitqueue_head(&ir.rwait);
timer_setup(&ir.timer, clear_flag, 0);
add_timer(&ir.timer);
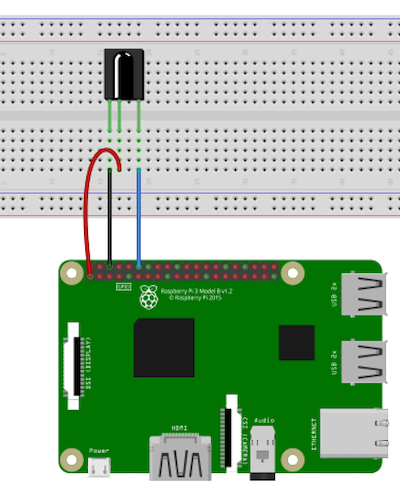
ir.gpio = 18;
if ((rc = gpio_request_one(ir.gpio, GPIOF_IN, "IR")) < 0) {
printk(KERN_ERR "ERROR%d: can not request gpio%d\n", rc, ir.gpio);
return rc;
}
ir.irq = gpio_to_irq(ir.gpio);
if ((rc = request_irq(ir.irq, ir_rx,
IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING,
"IR", NULL)) < 0) {
printk(KERN_ERR "ERROR%d: can not request irq\n", ir.irq);
return rc;
}
if ((rc = misc_register(&irdev)) < 0) {
return rc;
}
return 0;
}
module_init(ir_init);
static void __exit ir_exit(void) {
misc_deregister(&irdev);
free_irq(ir.irq, NULL);
gpio_free(ir.gpio);
del_timer(&ir.timer);
}
module_exit(ir_exit);
|