本书全名为《上帝掷骰子吗:量子物理史话》,所以是讲量子物理及其发展历史的科普书,由于“量子”对我这种普门外汉而言较为高深,所以我的理解可能与原著会有极大的偏差。
光,是什么?
光是一种物质吗?光有具体的形状吗?为什么宇宙的极限速度是光速?当然,古代的人们会告诉你:“上帝说要有光,于是就有了光”。不过对于这帮物理学家而言,这是毫无说服力的。
很早以前,物理学家们就从科学的角度去解释光到底是什么,然而谁也说不清。不过业界争论的焦点在于:光是一种粒子,还是一种波。并由此引发了三次波粒战争。
第一次波粒战争:彩虹
17世纪,以鼎鼎大名的艾萨克·牛顿为首,支持“微粒说”;以同样著名的物理学家胡克为首,支持“波动说”。
其实当时牛顿最初还相对中立,因为没有确凿的实验证据。但胡克这家伙总是对他冷嘲热讽,牛顿的个性也相当尖锐,因此干脆一边倒支持微粒。
最终,牛顿通过三棱镜发现了阳光其实由7中不同色彩的光组成,光被假想为不同颜色的小球混合在一起的结果。当时牛顿已发现了万有引力而闻名天下,再加上这么个极具说服力的实验结果,舆论就支持微粒,“波动说”输的体无完肤。
第二次波粒战争:双缝衍射、电磁波
18世纪,一名叫托马斯·杨做出了光的双缝衍射实验,发现光穿过两条小缝后,墙面会出现明暗相间的条纹——这可是波的专属。由此波动说异军突起。
之后,菲涅尔更是通过数学推理出光照到一小块圆片上,会因为衍射而在其影子的中心有一小块亮斑,后期被实验证明,这便是著名的柏松亮斑。
紧接着,伟大的赫兹登场了,他做了一个非常简单却非常牛逼的试验:
通过给两个金属铁球充电直到激发击穿电压,此时可以在空气中看到电火花;同时,在附近的另外两个金属铁球之间,也会附和着产生电火花,而它们却没接入任何电源。
通俗的解释试验原理:好比在平静的水平上晃动一个球,水面产生的波纹会导致另一个球跟着晃动。是的,这个试验证明电磁波的存在,无线通信由此产生,没有它,就没有我们的Wi-Fi蓝牙。
又是光的衍射、又是电磁波,波动说终于扳回一局!
第三次波粒战争:黑体辐射、量子、光电效应
19世纪,人们开始研究黑体辐射,所谓黑体是一种理想物质,可以对其无限升温,随着温度的升高,该物体会向发光,颜色从红——橙——黄——白——蓝渐变。正如宇宙中常见的恒星一样。简而言之,物体温度越高,电磁波(即光)的波长越短。那有没有一套公式能推导出温度和波长的关系?
抱歉,科学家总结的公式不仅复杂,而且与实际观测结果总是对不上号。必须用“长波公式”和“短波公式”来描述不同颜色下能量与波长的对应。就好比必须用两个路码表,一个只在100km/h内有效,一个只在100km/h以外有效,见鬼了。
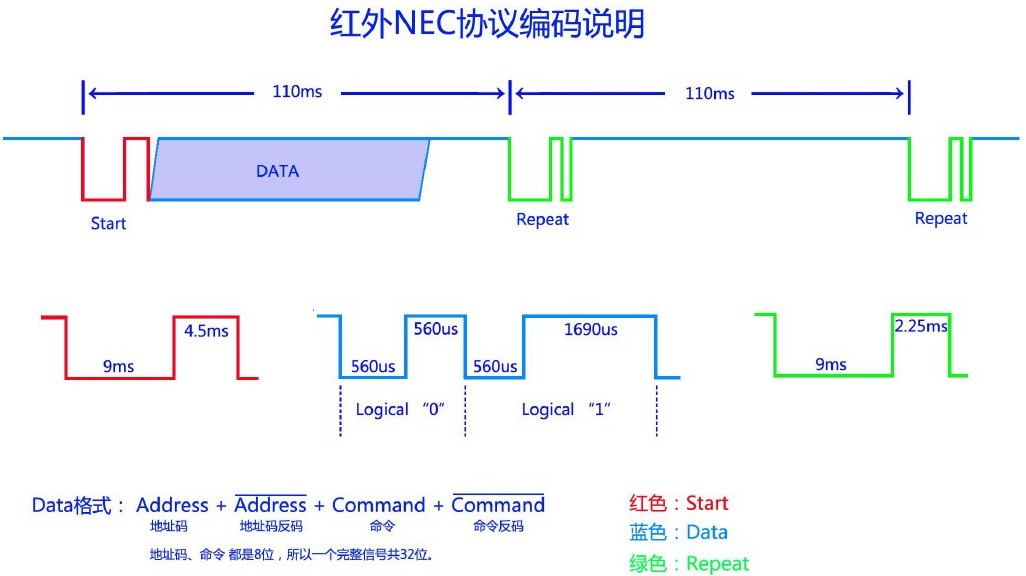
终于,伟大的普朗克来了,它假设:“能量的传递必须有一个不连续的单位,一份份的传递”,叫做“能量子”——也就是后来的量子。带着如此叛逆的想法,他重新整合了实验数据,并得到了以下方程:
E = hv
E代表能量,h是普朗克常数(神秘的量子常数),v是电磁波波长。
如此简洁,并能完美地应用到了任何波长当中。但背后却是一个如此叛逆的思想——能量有一个最小值!这种说法就像在宣称“圆周率3.1415926….一定有结束的那一位”!不过,这个概念在生活中很容里理解,比如一张照片,哪怕它有100亿像素的分辨率,它的最小单位也只能是像素,不可再往下分。
量子——能量是一份一份的传递的,也就是说能量是一种微粒!
好吧,普朗克一手开启了量子的新纪元,却因为思想过去颠覆而不肯面对,量子从出生就惨遭抛弃,谁也没想到再随后的一个多世纪里,它饱经沧桑,受尽人间冷暖,终于闯出了自己的一片天地。
如果说量子的概念还没让“微粒说”站稳脚跟,那么接下来的故事真可谓:成也萧何,败也萧何。
波动说凭借电磁波的发现扬眉吐气,打得微粒说满地找牙。但是,电磁波的试验留下了一个巨大的BUG——当光照在金属铁球表面时,电磁波更明显,后来证明这是由于光照在金属表面,会打出一部分电子——光电效应。
光电效应更重要的一点是:再强烈的红光一个电子也打不出,再微弱的蓝光也可以打出电子。说明打出电子只和光的波长相关,和光束本身的能量大小无关,为什么?
爱因斯坦登场了:根据量子理论,假设光由光子组成(光的量子),根据普朗克的E=hv,单个光子的能量只和它的频率大小(波长)有关,当光子的能量超过电子时,才能把它撞出来。再说强烈的红光,这仅能说明红光的光子数量庞大,但每个光子的个体能量依旧低于电子,量子理论中能量是一份份传递的,作用结果不累加,所以红光打不出电子。就像小孩搬石头,一次只允许一个人搬,而小孩的力气小于石头的重量,你就是把全世界的孩子叫过来搬——一块也搬不走。
量子、光子,微粒说还是打出了自己的一片天地,战争发展至此,双方都骑虎难下,只能论持久战了。不论战争的输赢,量子这个叛逆的孩子,早已在双方的激战中成长起来。
卷土重来,电子的波粒二象性
同样是19世纪,人们发现原子并非世间最小的物质,它由原子核及其周围的电子构成。伟大的物理学家玻尔,通过量子理论和实验观测,推导出了原子内部结构——电子围绕着原子核运动,且电子的运行轨道是量子化的。
但很快,人们发现这套理论的bug,电子围绕原子核运行时需要释放电磁辐射,从能量守恒的角度,电子会因能量衰减而坠落中心。于是乎有个叫德布罗意的科学家提出了一个假设:电子的运动伴随着一个波。这个概念解释起来很复杂,总之当电子以波的形式运动,能够支撑它稳定在自己的轨道中。
电子是个波?!
我们努力从量子概念来解释原子内部结构,解释能量的传递方式,结果用尽毕生的努力,从微粒的角度居然推导出一个波?!
电子双缝衍射
好吧,要证明/证伪电子是一种波很简单,只要是波就有衍射现象,那就让电子通过两条小缝,看看电子感光屏上会不会出现明暗相间的条纹。
结果——真的出现了!
接着有人提出,这种衍射是电子们的群体行为,很正常。你不信一次只发射一个电子,衍射图案肯定就没了。
结果——还是有衍射!
注意,实验过程是一次只发射一个电子,感光屏上会随机留下一个点,发射多足够多次后就会看到,这些点其实排列成了多条明暗相间的衍射条纹——就像事先约定好了一样。
到这里,连物理学家都懵逼了,电子是个波我认了,但一个电子怎么可能同时穿过双缝——自己衍射自己?事实胜于雄辩,让我们看个究竟…
结果——衍射行为消失了。
经过反复试验确认得出个结论:当人们不观察时,一个电子也能衍射;可当人们观察其过程时,电子就像颗普通的玻璃球,只是随机穿过其中一条缝。至于为什么,至今无解!
看不到,就用理论证明
电子“存心”不让人类看到它是如何运动的,那好,根据实验结果,至少在理论上描述一下吧?然而接下来发生的事情很讽刺…
海森堡登场,他站在粒子的角度,通过量子理论推导出了一套矩阵力学(其实就是数学中的线性代数),可以很好地计算出电子在不同轨道上的能量。
薛定谔登场,他站在波动的角度,通过经典数学,也得出了一套方程式,能够很好地计算出电子在轨道和能量之间的对应关系。
呵呵,看来,电子既是粒子也是波,世界是连续的也是非连续的。打了几个世纪的波粒战争,结果却是盲人摸象,一派摸到了这边,一派摸到了另一边!只见电子笑而不语——傻了吧?粒子和波是同一种东西。
是啊,人类所在的维度太低,根本无法想象,一只手既是左也是右,一个球可以同时穿过两扇门,一只猫既是死的也是活的,一种物质既是连续的也是不连续的。
一些假说
物理学家的争吵还在继续,如果我们继续追随他们的足迹,只会一脸茫然而不知所措。不必沮丧,“没人能理解量子论”,就连爱因斯坦对此也是彷徨的。
首先要明确,量子的几大(诡异)特性:
- 不连续,总有个最小的、不可分割的单位值
- 随机,例如电子出现的位置是无法计算的,只能用概率统计
- 叠加态,常识中截然不同的两种状态会同时存在
- 超距作用,不论相隔多远,两个量子的行为可以瞬间同步
- 不可观察,量子的行为表现,取决于你如何观察它
- 未来可以决定过去,通过量子纠缠
总之,量子的世界很魔幻,但唯一可以肯定的是,那里没有上帝!此外总结一些主流的假说,便于更形象地理解量子理论。
平行宇宙
我们,来自更高维度的投影。就像地上的影子,它是二维的,对于二维世界来说,每个影子都认为自己的独立客观存在的。但是站在三维世界的我们很清楚,人的影子数量是无限的,只要光源不同,影子就不同。
当没有光(不观察)的时候影子是游离状态,一旦有光(观察)的时候,影子会瞬间聚合成形。而影子的形状取决于光的角度,同一个人的不同影子可以高矮胖瘦,同时出现。
用影子做比喻可能不恰当,但大意就是这样,每当我们观察的时候,就会创造一个全新的宇宙。
隐变量
听说过虚数吗?我们从小就明白一个道理——负负得正!请你想象一个数字:
i² = -1
是的,存在这样一种数字,它自己乘自己后的结果是一个负数。而且,虚数这种思想在数学和物理界都非常有用。那虚数是什么?不好说,只能想象成一个我们看不到的“维度”,既然看不到,就叫它们隐变量。
比如,存在这样一根线,它恰好同时垂直于xyz轴——你能想象吗?如果存在,那这根线的每个坐标值都是虚数。
这类似于前面所说的平行宇宙,有一些物质,它的坐标除了三维之外,还有我们无法想象的更高纬度,必须要把那部分的坐标值代入,才能精确计算。
超弦理论
这部分我不是很懂,大意是说,万事万物都是由无数条一维的线构成,这根线在不停震动,这就是弦。如果进一步观察,会看到弦其实更像一根水管,中间是空的…不是说一维的吗?无法理解…
一点点哲学
尝试理解量子理论,包括本书,都不得不引入很多哲学概念,实在没办法,量子的概念过于飘渺,而且很多观点也真的只是想象而已!不论如何,我比较喜欢平行宇宙的假说,起码它更客观一点,更好理解一些。
比如,观察一下就会创造一个全新的宇宙。可能会觉得太过于夸张,但仔细想想,我们来自高纬度的投影,那我们所看到的就是客观真实的吗?
白马非“白”马,人的眼中马是白色的,那拥有温度感官的蛇的眼中呢?有超声波感官的蝙蝠眼中呢?有紫外线感官的蜜蜂眼中呢?白色,只是马对太阳光的反射罢了,恰巧人眼能感知7中颜色而已,里面还有太多太多的“颜色”是我们根本感受不到的,但不代表它不存在。
同样的,什么是客观上的“我”,朋友眼里有个“我”的投影,那就等同于朋友对我进行了观察,创造了一个全新的“我”。有无数人观察过“我”,世上就有千千万万个“我”,有人认为“我”善良,有人觉得“我”阴险,“我”同时存在不同地方,“我”总是随机出现,“我”已经死了,“我”还活着。这完全取决于那个观察“我”的人。
量子,最神秘的幽灵,它颠覆了物理学,也被应用到了无数的行业。毋庸置疑,人类目前正游离在真理的边缘,世界将被重新阐释。